Moon Landing: Difference between revisions
RobertLampel (talk | contribs) |
RobertLampel (talk | contribs) |
||
| Line 35: | Line 35: | ||
<gallery caption="Reference solution plots" widths="500px" heights="300px" perrow="1"> | <gallery caption="Reference solution plots" widths="500px" heights="300px" perrow="1"> | ||
Image:Moon_Landing.png| States and discretized control for a local optimum. The free end time <math> | Image:Moon_Landing.png| States and discretized control for a local optimum. The free end time <math>t_\mathrm{f}</math> was modeled using the additional control <math>t</math>. | ||
</gallery> | </gallery> | ||
Revision as of 10:11, 3 February 2026
| Moon Landing | |
|---|---|
| State dimension: | 1 |
| Differential states: | 3 |
| Discrete control functions: | 2 |
The Moon Landing problem is a simplification of a spacecraft trying to land on the moon's surface. Its objective is to minimize the fuel consumption during the landing maneuver while landing savely on the ground with zero vertical velocity.
The implementation here is taken from [1]. Its dynamics are given by a two-dimensional ODE model.
Mathematical formulation
Reference Solutions
Here is one local solution to the above control problem.
- Reference solution plots
-
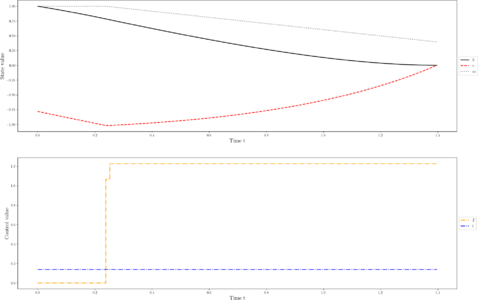 States and discretized control for a local optimum. The free end time was modeled using the additional control .
States and discretized control for a local optimum. The free end time was modeled using the additional control .

Miscellaneous and Further Reading
This formulation and a detailed description can be found in [1].
References
[1] Multidisciplinary Optimal Control Library: https://openmdao.org/dymos/docs/latest/examples/moon_landing/moon_landing.html