Fermenter: Difference between revisions
RobertLampel (talk | contribs) |
RobertLampel (talk | contribs) |
||
| Line 65: | Line 65: | ||
== Parameters == | == Parameters == | ||
{| | {| border="1" align="center" cellpadding="5" cellspacing="0" | ||
|- bgcolor=#c7c7c7 | |||
|- | !Symbol !! Value | ||
|- | |- | ||
|<math>t_f</math> | |<math>t_f</math> | ||
| Line 95: | Line 93: | ||
|<math>5 \cdot 10^4</math> | |<math>5 \cdot 10^4</math> | ||
|} | |} | ||
== Reference Solutions == | == Reference Solutions == | ||
Revision as of 12:22, 24 November 2025
| Fermenter | |
|---|---|
| State dimension: | 1 |
| Differential states: | 9 |
| Discrete control functions: | 3 |
The Fermenter problem describes a fermentation process with two substrates and , and two products and . Enzyme biomass concentration is modeled by a state . Further states are the fermentation volume and the accumulated product and substrates and . and can be fed into the reactor. This is described by two controls and . Furthermore, can be harvested with rate . The dynamics are given by an ODE model.
This model description is taken from the PhD thesis of Dennis Janka [1].
The optimal control function exhibits a singular arc.
Mathematical formulation
with bounds for the control functions given by
and bounds for the states given by
Parameters
| Symbol | Value |
|---|---|
Reference Solutions
Here is one local solution to the above control problem.
- Reference solution plots
-
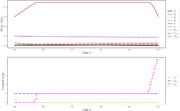 States and discretized control for a local optimum.
States and discretized control for a local optimum.

References
[1] Janka, D.: Sequential quadratic programming with indefinite Hessian approximations for nonlinear optimum experimental design for parameter estimation in differential-algebraic equations. Ph.D. thesis, Ruprecht-Karls-Universität Heidelberg (2015). URL https://mathopt.de/publications/Janka2015.pdf