Ducted Fan: Difference between revisions
RobertLampel (talk | contribs) No edit summary |
RobertLampel (talk | contribs) |
||
| Line 13: | Line 13: | ||
== Mathematical formulation == | == Mathematical formulation == | ||
We summarize the states as <math>x := (x_1, v_1, x_2, v_2, \alpha, v_\alpha)</math>. | |||
<p> | <p> | ||
<math> | <math> | ||
\begin{array}{lll} | \begin{array}{lll} | ||
\displaystyle \min_{u} && \frac{1}{ | \displaystyle \min_{u, t_\mathrm{f}} && \frac{1}{t_\mathrm{f}} \int_0^{t_\mathrm{f}} \left( 2 u_1^2(t) + u_2^2(t) \right) \mathrm{d}t + \mu \, t_\mathrm{f} \\ | ||
\text{subject to} \\ | \text{subject to} \\ | ||
\quad \dot{ | \quad \dot{x_1}(t) & = & v_1(t),\\ | ||
\quad \dot{ | \quad \dot{v_1}(t) & = & \frac{1}{m} \left( u_1 \cos \alpha - u_2 \sin \alpha \right), | ||
\quad \dot{x_2}(t) & = & | \quad \dot{x_2}(t) & = & v_2(t), \\ | ||
\quad \dot{ | \quad \dot{v_2}(t) & = & \frac{1}{m} \left( -\mathrm{mg} + u_1 \sin \alpha + u_2 \cos \alpha \right), \\ | ||
\quad | \quad \dot{\alpha} & = & v_\alpha, \\ | ||
\quad | \quad \dot{v}_\alpha & = & \frac{r}{J} u_1, \\ | ||
\quad | \quad x(0) &=& (0, 0, 0, 0, 0, 0)^T, \\ | ||
\quad x(t_\mathrm{f}) &=& (1, 0, 0, 0, 0, 0)^T, \\ | |||
\quad u_1(t) & \in & [-5, 5] \ \quad \forall t \in [0,t_\mathrm{f}], \\ | |||
\quad u_2(t) & \in & [0, 17] \ \quad \forall t \in [0,t_\mathrm{f}], \\ | |||
\quad \alpha(t) & \in & [-30, 30] \ \quad \forall t \in [0,t_\mathrm{f}] | |||
\end{array} | \end{array} | ||
</math> | </math> | ||
Revision as of 10:12, 24 November 2025
| Ducted Fan | |
|---|---|
| State dimension: | 1 |
| Differential states: | 4 |
| Discrete control functions: | 1 |
The Ducted Fan problem is a classical nonlinear benchmark in optimal control with multiple input and state constraints. This description is taken from [1].
It models the planar motion of a ducted fan aircraft, described by its horizontal and vertical positions , the angle with respect to the vertical, and their velocities . The inputs are the body-fixed thrust components , generated by moving flaps at the end of the duct.
The objective is to steer the fan from the origin to a horizontal position of at altitude , with zero final velocities and attitude, in a free final time , while minimising a trade-off between control effort and transition time.
Mathematical formulation
We summarize the states as .
Parameters
These fixed values are used within the model:
| Symbol | Value | Description |
|---|---|---|
| 100 | First mass directly affected by | |
| 2 | Second mass influenced by damping control | |
| 100 | Spring connecting first mass to reference | |
| 3 | Coupling spring between the two masses | |
| 0.5 | Damping affecting second mass | |
| Duration of the motion | ||
| - | Modulates the damping of the second mass |
Reference Solutions
Here is one local solution to the above control problem.
- Reference solution plots
-
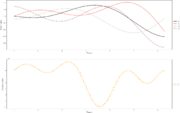 States and discretized control for a local optimum.
States and discretized control for a local optimum.

Miscellaneous and Further Reading
This formulation and a detailed description can be found in [1].
References
[1] Caillau, J.-B., Cots, O., Gergaud, J., & Martinon, P. OptimalControlProblems.jl: a collection of optimal control problems with ODE's in Julia. https://github.com/control-toolbox/OptimalControlProblems.jl/blob/main/ext/Descriptions/double_oscillator.md