Fermenter: Difference between revisions
RobertLampel (talk | contribs) No edit summary |
RobertLampel (talk | contribs) |
||
| Line 26: | Line 26: | ||
\quad \dot{V}(t) &=& u_{S_1}(t) + u_{S_2}(t) - u_p(t) \\ | \quad \dot{V}(t) &=& u_{S_1}(t) + u_{S_2}(t) - u_p(t) \\ | ||
\quad \dot{G}(t) &=& -\gamma_{x,g} \cdot E(t) \cdot S_1(t) \cdot S_2(t) \cdot G(t) - G(t) \cdot \frac{u_{S_1} + u_{S_2}(t)}{25 \cdot V(t)} \\ | \quad \dot{G}(t) &=& -\gamma_{x,g} \cdot E(t) \cdot S_1(t) \cdot S_2(t) \cdot G(t) - G(t) \cdot \frac{u_{S_1} + u_{S_2}(t)}{25 \cdot V(t)} \\ | ||
\quad | \quad \dot{P_{\text{acc}}}(t) &=& u_P(t) \cdot P(t) + \frac{u_{S_1}(t) + u_{S_2}(t) - u_P(t)}{25} \cdot P(t) + V(t) \cdot \dot{P}(t) \\ | ||
\quad \dot{S_{1, \text{acc}}}(t) &=& 0.0168 \cdot u_{S_1}(t) \\ | \quad \dot{S_{1, \text{acc}}}(t) &=& 0.0168 \cdot u_{S_1}(t) \\ | ||
\quad \dot{S_{2, \text{acc}}}(t) &=& 0.01332 \cdot u_{S_2}(t) | \quad \dot{S_{2, \text{acc}}}(t) &=& 0.01332 \cdot u_{S_2}(t) | ||
Revision as of 08:39, 22 August 2025
| Fermenter | |
|---|---|
| State dimension: | 1 |
| Differential states: | 9 |
| Discrete control functions: | 3 |
The Fermenter problem describes a fermentation process with two substrates and , and two products and . Enzyme biomass concentration is modeled by a state . Further states are the fermentation volume and the accumulated product and substrates and . and can be fed into the reactor. This is described by two controls and . Furthermore, can be harvested with rate . The dynamics are given by an ODE model.
This model description is taken from the PhD thesis of Dennis Janka [1].
The optimal control function exhibits a singular arc.
Mathematical formulation
with bounds for the control functions given by
and bounds for the states given by
Parameters
| Symbol | Value |
Reference Solutions
Here is one local solution to the above control problem.
- Reference solution plots
-
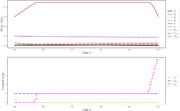 States and discretized control for a local optimum.
States and discretized control for a local optimum.

References
[1] Janka, D.: Sequential quadratic programming with indefinite Hessian approximations for nonlinear optimum experimental design for parameter estimation in differential-algebraic equations. Ph.D. thesis, Ruprecht-Karls-Universität Heidelberg (2015). URL https://mathopt.de/publications/Janka2015.pdf