Denbigh Reaction: Difference between revisions
RobertLampel (talk | contribs) Created page with "{{Dimensions |nd = 1 |nx = 3 |nw = 1 }} The '''Mountain Car problem''' s based on the system of chemical reactions initially considered by Denbigh (1958), which was also studied by Aris (1960) and more recently by Luus (1994): <p> <math> \begin{align} A + B &\rightarrow X \\ X &\rightarrow Q \\ X &\rightarrow Y \\ A + X &\rightarrow P \end{align} </math> </p> where X is an intermediate, Y is the desired product, and P and Q are waste prod..." |
RobertLampel (talk | contribs) |
||
| Line 24: | Line 24: | ||
<math> | <math> | ||
\begin{array}{lll} | \begin{array}{lll} | ||
\displaystyle \ | \displaystyle \max_{u} && x_3(t_f) \\ | ||
\text{subject to} \\ | \text{subject to} \\ | ||
\quad \dot{ | \quad \dot{x_1}(t) & = & -k_1(t) \cdot x_1(t) - k_2(t) \cdot x_1(t),\\ | ||
\quad \dot{ | \quad \dot{x_2}(t) & = & k_1(t) \cdot x_1(t) - k_3(t) + k_4(t) \cdot x_2(t),\\ | ||
\quad | \quad \dot{x_3}(t) & = & k_3(t) \cdot x_2(t),\\ | ||
\quad | \quad k_i(t) & = & k_i^* \cdot \exp\left( \frac{-E_i}{T(t)} \right), \ i=1,\ldots,4, \\ | ||
\ | \quad x(0) &=& (1, 0, 0)^T, \\ | ||
\quad | \quad T(t) & \in & [273, 415] \ \quad \forall t \in [0,t_f] | ||
\quad | |||
\end{array} | \end{array} | ||
</math> | </math> | ||
Revision as of 09:25, 21 August 2025
| Denbigh Reaction | |
|---|---|
| State dimension: | 1 |
| Differential states: | 3 |
| Discrete control functions: | 1 |
The Mountain Car problem s based on the system of chemical reactions initially considered by Denbigh (1958), which was also studied by Aris (1960) and more recently by Luus (1994):
where X is an intermediate, Y is the desired product, and P and Q are waste products.
Its dynamics are given by a three-dimensional ODE model. The optimal integer control functions exhibits a bang bang structure.
Mathematical formulation
Reference Solutions
Here is one local solution to the above control problem.
- Reference solution plots
-
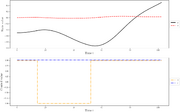 States and discretized control for a local optimum.
States and discretized control for a local optimum.

Miscellaneous and Further Reading
This formulation and a detailed description can be found in [1].
References
[1] Multidisciplinary Optimal Control Library: https://openmdao.org/dymos/docs/latest/examples/mountain_car/mountain_car.html
[2] Andrew William Moore. Efficient memory-based learning for robot control. Technical Report UCAM-CL-TR-209, University of Cambridge, Computer Laboratory, November 1990. URL: https://www.cl.cam.ac.uk/techreports/UCAM-CL-TR-209.pdf, doi:10.48456/tr-209.
[3] Alexey A Melnikov, Adi Makmal, and Hans J Briegel. Projective simulation applied to the grid-world and the mountain-car problem. arXiv preprint arXiv:1405.5459, 2014.