LV Competitive: Difference between revisions
RobertLampel (talk | contribs) |
RobertLampel (talk | contribs) |
||
| Line 14: | Line 14: | ||
<math> | <math> | ||
\begin{array}{llclr} | \begin{array}{llclr} | ||
\displaystyle \min_{u} & \int_0^{t_f} && (x_0(t) - 1)^2 + (x_1 | \displaystyle \min_{u} & \int_0^{t_f} && (x_0(t) - 1)^2 + (x_1(t) - 1)^2 \ dt \\[1.5ex] | ||
\mbox{s.t.} | \mbox{s.t.} | ||
& \dot{x}_0(t) & = & x_0(t) \left(1 - \frac{x_0(t) + \alpha x_1(t)}{K} \right) - c_1 x_0(t) u(t), \\ | & \dot{x}_0(t) & = & x_0(t) \left(1 - \frac{x_0(t) + \alpha x_1(t)}{K} \right) - c_1 x_0(t) u(t), \\ | ||
Revision as of 09:49, 29 January 2026
| LV Competitive | |
|---|---|
| State dimension: | 1 |
| Differential states: | 2 |
| Discrete control functions: | 1 |
This Competitive Lotka Volterra problem is a variant of the Lotka Volterra fishing problem. Its dynamics are given via a two-dimensional ODE model.
Mathematical formulation
The optimal control problem is given by
Parameters
These fixed values are used within the model.
Reference Solutions
- Reference solution plots
-
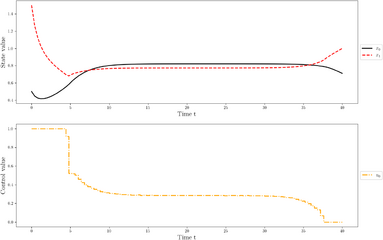 Local optimum for a direct approach and start values .
Local optimum for a direct approach and start values . -
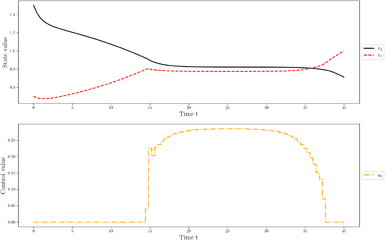 Local optimum for a direct approach and start values .
Local optimum for a direct approach and start values .

