Hang Glider: Difference between revisions
RobertLampel (talk | contribs) |
RobertLampel (talk | contribs) |
||
| Line 21: | Line 21: | ||
\quad \dot{v_x}(t) & = & - \frac{L(t) \cdot w(t) + D(t) \cdot v_x(t)}{mv(t)}, \\ | \quad \dot{v_x}(t) & = & - \frac{L(t) \cdot w(t) + D(t) \cdot v_x(t)}{mv(t)}, \\ | ||
\quad \dot{v_y}(t) & = & \frac{L(t) \cdot v_x(t) - D(t) \cdot w}{mv(t)} - g, \\ | \quad \dot{v_y}(t) & = & \frac{L(t) \cdot v_x(t) - D(t) \cdot w}{mv(t)} - g, \\ | ||
\quad | \quad x(t) & \geq & 0 \ \quad & \forall t \in [0, T], \\ | ||
\quad v_x(t) & \geq & 0 \ \quad & \forall t \in [0, T], \\ | |||
\quad x(0) & = & (x_0, y_0, v_{x,0}, v_{y,0})^T, \\ | \quad x(0) & = & (x_0, y_0, v_{x,0}, v_{y,0})^T, \\ | ||
\quad y(t_f) & = & y_f \\ | \quad y(t_f) & = & y_f \\ | ||
| Line 34: | Line 35: | ||
<math> | <math> | ||
\begin{align} | \begin{align} | ||
r(t) &= \left( \frac{x(t)}{r_0} - 2.5 \right)^2 | r(t) &= \left( \frac{x(t)}{r_0} - 2.5 \right)^2, \\ | ||
U_\text{updraft}(x) &= u_c\, (1 - r) | U_\text{updraft}(x(t)) &= u_c\, (1 - r(t)) \cdot \exp\left(-r(t)\right), \\ | ||
w(t) &= v_y(t) - U_\text{updraft}(x), \\ | w(t) &= v_y(t) - U_\text{updraft}(x), \\ | ||
v(t) &= \sqrt{v_x(t)^2 + w(t)^2}, \\ | v(t) &= \sqrt{v_x(t)^2 + w(t)^2}, \\ | ||
D(t) &= \frac{1}{2} \rho S (c_0 + c_1 c_L(t)^2) v(t)^2, \\ | D(t) &= \frac{1}{2} \rho S (c_0 + c_1 c_L(t)^2) \cdot v(t)^2, \\ | ||
L(t) &= \frac{1}{2} \rho S c_L(t) v(t)^2. | L(t) &= \frac{1}{2} \rho S c_L(t) v(t)^2. | ||
\end{align} | \end{align} | ||
Revision as of 10:08, 25 November 2025
| Hang Glider | |
|---|---|
| State dimension: | 1 |
| Differential states: | 4 |
| Discrete control functions: | 2 |
The Hang Glider problem is a classical benchmark in optimal control. This description is taken from [1].
It consists of steering a hang glider from an initial horizontal position and altitude to a target altitude while maximising the horizontal distance travelled. The glider dynamics incorporate lift, drag, gravity, and the effect of a thermal updraft. The control variable is the lift coefficient , which modulates the aerodynamic lift and influences the trajectory through the thermal region.
Mathematical formulation
with the auxiliary equations:
Parameters
These fixed values are used within the model:
| Symbol | Value | Description |
|---|---|---|
| 0 | Initial horizontal position | |
| 1000 | Initial altitude | |
| 900 | Final altitude | |
| 13.23 | Initial horizontal velocity | |
| 13.23 | Final horizontal velocity | |
| -1.288 | Initial vertical velocity | |
| -1.288 | Final vertical velocity | |
| 2.5 | ||
| 100 | ||
| 0.034 | ||
| 0.069662 | ||
| 14 | Wing area | |
| 1.13 | Air density | |
| 100 | Mass of the glider | |
| 9.81 | Gravitational constant |
Reference Solutions
Here is one local solution to the above control problem.
- Reference solution plots
-
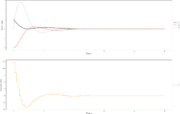 States and discretized control for a local optimum.
States and discretized control for a local optimum.

Miscellaneous and Further Reading
This formulation and a detailed description can be found in [1].
References
[1] Caillau, J.-B., Cots, O., Gergaud, J., & Martinon, P. OptimalControlProblems.jl: a collection of optimal control problems with ODE's in Julia. https://github.com/control-toolbox/OptimalControlProblems.jl/blob/main/ext/Descriptions/robbins.md