LV Shared Resource: Difference between revisions
RobertLampel (talk | contribs) |
RobertLampel (talk | contribs) |
||
| Line 41: | Line 41: | ||
== Reference Solutions == | == Reference Solutions == | ||
<gallery caption="Reference solution plots" widths="180px" heights="140px" perrow="2"> | <gallery caption="Reference solution plots" widths="180px" heights="140px" perrow="2"> | ||
Image: | Image:LV_Shared_init_1.png| Local optimum a direct approach for start values <math>x_0 = (1.5, 0.5, 1)</math>. | ||
Image: | Image:LV_Shared_init_2.png| Local optimum a direct approach for start values <math>x_0 = (1.5, 1, 0.5)</math>. | ||
</gallery> | </gallery> | ||
| Line 63: | Line 52: | ||
[[Category:ODE model]] | [[Category:ODE model]] | ||
[[Category:Tracking objective]] | [[Category:Tracking objective]] | ||
[[Category:Sensitivity-seeking arcs]] | [[Category:Sensitivity-seeking arcs]] | ||
[[Category:Population dynamics]] | [[Category:Population dynamics]] | ||
Revision as of 07:16, 25 August 2025
| LV Shared Resource | |
|---|---|
| State dimension: | 1 |
| Differential states: | 3 |
| Discrete control functions: | 5 |
| Interior point equalities: | 3 |
This Lotka Volterra problem with explicit inclusion of a shared resource is a variant of the Lotka Volterra fishing problem. Its dynamics are given via a three-dimensional ODE model.
Mathematical formulation
The optimal control problem is given by
Parameters
These fixed values are used within the model.
Reference Solutions
- Reference solution plots
-
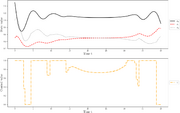 Local optimum a direct approach for start values .
Local optimum a direct approach for start values . -
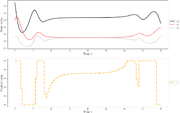 Local optimum a direct approach for start values .
Local optimum a direct approach for start values .

