Linear Quadratic Regulator: Difference between revisions
RobertLampel (talk | contribs) Created page with "{{Dimensions |nd = 1 |nx = 1 |nw = 1 }} The '''Linear Quadratic Regulator problem''' is a one-dimensional toy ODE model which is especially suited for multiple shooting solvers. It aims to minimize a quadratic Lagrange term. The optimal integer control functions exhibits a singular arc. == Mathematical formulation == <p> <math> \begin{array}{lll} \displaystyle \min_{x,w} && \int_0^{1..." |
RobertLampel (talk | contribs) |
||
| Line 16: | Line 16: | ||
\text{subject to} \\ | \text{subject to} \\ | ||
\quad \dot{x}(t) & = & a \cdot x(t) + b \cdot u(t),\\ | \quad \dot{x}(t) & = & a \cdot x(t) + b \cdot u(t),\\ | ||
\quad x(0) &=& 1 | \quad x(0) &=& 1 | ||
\end{array} | \end{array} | ||
</math> | </math> | ||
</p> | </p> | ||
== Parameters == | == Parameters == | ||
Revision as of 13:15, 21 August 2025
| Linear Quadratic Regulator | |
|---|---|
| State dimension: | 1 |
| Differential states: | 1 |
| Discrete control functions: | 1 |
The Linear Quadratic Regulator problem is a one-dimensional toy ODE model which is especially suited for multiple shooting solvers. It aims to minimize a quadratic Lagrange term.
The optimal integer control functions exhibits a singular arc.
Mathematical formulation
Parameters
We choose and .
Reference Solutions
Here is one local solution to the above control problem.
- Reference solution plots
-
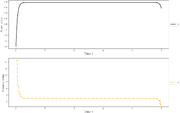 States and discretized control for a local optimum.
States and discretized control for a local optimum.

Miscellaneous and Further Reading
The problem description and further references can be found in the PhD thesis of Michael Ernst Geiger [1].
References
[1] "Adaptive Multiple Shooting for Boundary Value Problems and Constrained Parabolic Optimization Problems" by M. E. Geiger