Denbigh Reaction: Difference between revisions
RobertLampel (talk | contribs) No edit summary |
RobertLampel (talk | contribs) No edit summary |
||
| Line 18: | Line 18: | ||
where <math>X</math> is an intermediate, <math>Y</math> is the desired product, and <math>P</math> and <math>Q</math> are waste products. The optimal control problem is to find <math>T(t)</math> (the temperature of the reactor as a function of time) so that the yield of <math>Y</math> is maximized at the end of the given batch time <math>t_f</math>. | where <math>X</math> is an intermediate, <math>Y</math> is the desired product, and <math>P</math> and <math>Q</math> are waste products. The optimal control problem is to find <math>T(t)</math> (the temperature of the reactor as a function of time) so that the yield of <math>Y</math> is maximized at the end of the given batch time <math>t_f</math>. | ||
Its dynamics are given by a three-dimensional [[:Category:ODE model|ODE model]]. The optimal | Its dynamics are given by a three-dimensional [[:Category:ODE model|ODE model]]. The optimal control functions is given by a [[:Path-constrained arcs|path-constrained arc]]. | ||
== Mathematical formulation == | == Mathematical formulation == | ||
Revision as of 11:03, 21 August 2025
| Denbigh Reaction | |
|---|---|
| State dimension: | 1 |
| Differential states: | 3 |
| Discrete control functions: | 1 |
The Mountain Car problem s based on the system of chemical reactions initially considered by Denbigh [1], which was also studied by Aris [2] and more recently by Luus [3]:
where is an intermediate, is the desired product, and and are waste products. The optimal control problem is to find (the temperature of the reactor as a function of time) so that the yield of is maximized at the end of the given batch time .
Its dynamics are given by a three-dimensional ODE model. The optimal control functions is given by a path-constrained arc.
Mathematical formulation
Parameters
| Symbol | Value |
Reference Solutions
Here is one local solution to the above control problem.
- Reference solution plots
-
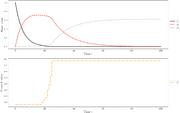 States and discretized control for a local optimum.
States and discretized control for a local optimum.

Miscellaneous and Further Reading
This formulation and a detailed description can be found in [1].
References
[1] Kenneth Denbigh, Chemical Reactor Theory an Introduction, Cambridge University Press, London, 1965.
[2] Rutherford Aris. The Optimal Design of Chemical Reactors A Study in Dynamic Programming. Academic Press, London, 1961.
[3] Rein Luus, Iterative Dynamic Programming. CHAPMAN & HALL/CRC Monographs and Surveys in Pure and Applied Mathematics, New York, 2000.
[4] Tomlab optimization: https://tomopt.com/docs/propt/tomlab_propt030.php