Bryson Denham: Difference between revisions
RobertLampel (talk | contribs) |
RobertLampel (talk | contribs) |
||
| Line 13: | Line 13: | ||
<math> | <math> | ||
\begin{array}{lll} | \begin{array}{lll} | ||
\displaystyle \min_{u} && \int_0^{1} \frac{1}{2} \cdot | \displaystyle \min_{u} && \int_0^{1} \frac{1}{2} \cdot u(t)^2 dt \\ | ||
\text{subject to} \\ | \text{subject to} \\ | ||
\quad \dot{x}(t) & = & v(t),\\ | \quad \dot{x}(t) & = & v(t),\\ | ||
Revision as of 09:09, 20 August 2025
| Bryson Denham | |
|---|---|
| State dimension: | 1 |
| Differential states: | 2 |
| Discrete control functions: | 1 |
The Bryson-Denham problem is a two-dimensional toy ODE model. It aims to minimize a quadratic Lagrange term.
The optimal integer control functions exhibits a singular arc.
Mathematical formulation
Reference Solutions
Here is one local solution to the above control problem.
- Reference solution plots
-
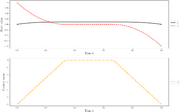 States and discretized control for a local optimum.
States and discretized control for a local optimum.

Miscellaneous and Further Reading
The Bryson-Denham problem is a variation of the double integrator problem [1]. This formulation detailed description can be found in [2].
References
[1] Arthur E Bryson and Yu-Chi Ho. Applied Optimal Control: Optimization, Estimation and Control. CRC Press, 1975.
[2] Multidisciplinary Optimal Control Library: https://openmdao.org/dymos/docs/latest/examples/bryson_denham/bryson_denham.html