Three Tank multimode problem: Difference between revisions
ClemensZeile (talk | contribs) |
ClemensZeile (talk | contribs) |
||
| Line 38: | Line 38: | ||
<gallery caption="Reference solution plots" widths="180px" heights="140px" perrow="2"> | <gallery caption="Reference solution plots" widths="180px" heights="140px" perrow="2"> | ||
Image:three_tank_relaxed_solution.png| Optimal relaxed controls and states determined by an direct approach with python 3.6 and CasADi, applied Multiple Shooting, 4th order Runge Kutta scheme and | Image:three_tank_relaxed_solution.png| Optimal relaxed controls and states determined by an direct approach with python 3.6 and CasADi, applied Multiple Shooting, 4th order Runge Kutta scheme and 100 discretization intervals. | ||
Image:three_tank_binary_solution.png| According optimal binary controls and states determined by the direct approach. The relaxed controls were approximated by Combinatorial Integral Approximation. | Image:three_tank_binary_solution.png| According optimal binary controls and states determined by the direct approach. The relaxed controls were approximated by Combinatorial Integral Approximation. | ||
Image:three_tank_rounding_solution.png| Binary and relaxed control values as part of the Combinatorial Integral Approximation problem | Image:three_tank_rounding_solution.png| Binary and relaxed control values as part of the Combinatorial Integral Approximation problem | ||
Revision as of 09:13, 14 March 2020
| Three Tank multimode problem | |
|---|---|
| State dimension: | 1 |
| Differential states: | 3 |
| Discrete control functions: | 3 |
| Interior point equalities: | 2 |
This site describes a Double tank problem variant with three binary controls instead of only one control and three tanks, i.e., three differential states representing different compartments.
Mathematical formulation
The mixed-integer optimal control problem is given by
Parameters
These fixed values are used within the model.
Reference Solutions
If the problem is relaxed, i.e., we demand that be in the continuous interval instead of the binary choice , the optimal solution can be determined by means of direct optimal control and the CIA decomposition. We denote the relaxed control values with .
The optimal objective value of the relaxed problem with is . The objective value of the binary controls obtained by Combinatorial Integral Approimation (CIA) is .
- Reference solution plots
-
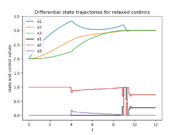 Optimal relaxed controls and states determined by an direct approach with python 3.6 and CasADi, applied Multiple Shooting, 4th order Runge Kutta scheme and 100 discretization intervals.
Optimal relaxed controls and states determined by an direct approach with python 3.6 and CasADi, applied Multiple Shooting, 4th order Runge Kutta scheme and 100 discretization intervals. -
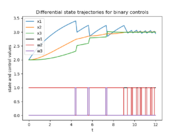 According optimal binary controls and states determined by the direct approach. The relaxed controls were approximated by Combinatorial Integral Approximation.
According optimal binary controls and states determined by the direct approach. The relaxed controls were approximated by Combinatorial Integral Approximation. -
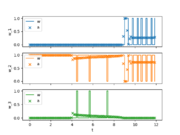 Binary and relaxed control values as part of the Combinatorial Integral Approximation problem
Binary and relaxed control values as part of the Combinatorial Integral Approximation problem


