Jackson OED: Difference between revisions
RobertLampel (talk | contribs) |
RobertLampel (talk | contribs) |
||
| (7 intermediate revisions by the same user not shown) | |||
| Line 22: | Line 22: | ||
</p> | </p> | ||
The initial values and <math>t_f</math> are fixed. We are interested in how to choose the control <math>u</math> and when to measure, with an upper bound <math>M</math> on the measuring time. We can measure the states <math>x_1</math> and <math>x_2</math> directly, <math>h^1(x(t)) = x_1(t)</math> and <math>h^2(x(t)) = x_2(t)</math>. We use two different sampling functions, <math> | The initial values and <math>t_f</math> are fixed. We are interested in how to choose the control <math>u</math> and when to measure, with an upper bound <math>M</math> on the measuring time. We can measure the states <math>x_1</math> and <math>x_2</math> directly, <math>h^1(x(t)) = x_1(t)</math> and <math>h^2(x(t)) = x_2(t)</math>. We use two different sampling functions, <math>w_1(\cdot)</math> and <math>w_2(\cdot)</math> in the same experimental setting. This can be seen either as a two-dimensional measurement function <math>h(x(t))</math>, or as a special case of a multiple experiment, in which <math>u(\cdot), x(\cdot)</math>, and <math>G(\cdot)</math> are identical. | ||
Now we formulate the OED problem with <math>\theta := (k_1, k_2)</math>: | Now we formulate the OED problem with <math>\theta := (k_1, k_2)</math>: | ||
| Line 30: | Line 30: | ||
\displaystyle \min_{x,G,F,z,w,u} && \text{trace} \; \left( F^{-1}(t_f) \right) \\ | \displaystyle \min_{x,G,F,z,w,u} && \text{trace} \; \left( F^{-1}(t_f) \right) \\ | ||
\text{subject to} \\ | \text{subject to} \\ | ||
\quad \dot{x}(t) & = & f(x(t),\theta) \\ | \quad \dot{x}(t) & = & f(x(t),u(t),\theta) \\ | ||
\quad \dot{G}(t) & = & f_x(x(t),\theta) G(t) + f_\theta(x(t),\theta) \\ | \quad \dot{G}(t) & = & f_x(x(t),u(t),\theta) G(t) + f_\theta(x(t),u(t),\theta) \\ | ||
\quad \dot{F}(t) & = & \sum_{i=1}^{n_o} w_i(t)(h^i_x(x(t))G(t))^T(h^i_x(x(t))G(t)) \\ | \quad \dot{F}(t) & = & \sum_{i=1}^{n_o} w_i(t)(h^i_x(x(t))G(t))^T(h^i_x(x(t))G(t)) \\ | ||
\quad \dot{z}(t) & = & w(t), \\ | \quad \dot{z}(t) & = & w(t), \\ | ||
\quad x(0) & = & x_0 \\ | \quad x(0) & = & x_0 \\ | ||
\quad G(0) & = & \frac{\partial x(0)}{\partial \theta} \\ | \quad G(0) & = & \frac{\partial x(0)}{\partial \theta} \\ | ||
\quad F(0) & = & | \quad F(0) & = & I \cdot \varepsilon_{\mathrm{reg}}, \\ | ||
\quad z(0) & = & 0 \\ | \quad z(0) & = & 0 \\ | ||
\quad u(t) & \in & \mathcal{U} \\ | \quad u(t) & \in & \mathcal{U} \\ | ||
| Line 46: | Line 46: | ||
The evolution of the symmetric matrix <math>F: \left[0,t_f \right] \rightarrow \mathbb{R}^{2 \times 2}</math> is given by the weighted sum of observability Gramians | The evolution of the symmetric matrix <math>F: \left[0,t_f \right] \rightarrow \mathbb{R}^{2 \times 2}</math> is given by the weighted sum of observability Gramians | ||
<math>h^i_x (x(t)) G(t), \ i = 1,2</math> for each observed function of states. | <math>h^i_x (x(t)) G(t), \ i = 1,2,</math> for each observed function of states. | ||
== Parameters == | == Parameters == | ||
| Line 63: | Line 63: | ||
|- | |- | ||
| align=center | <math>t_\mathrm{f}</math> || align=right | 1 || Horizon of the control problem | | align=center | <math>t_\mathrm{f}</math> || align=right | 1 || Horizon of the control problem | ||
|- | |||
| align=center | <math>\varepsilon_\mathrm{reg}</math> || align=right | 0.01 || Regularization of Fisher matrix | |||
|- | |- | ||
| align=center | <math>\mathcal{U}</math> || align=right | [0,1] || Bounds of control function | | align=center | <math>\mathcal{U}</math> || align=right | [0,1] || Bounds of control function | ||
| Line 68: | Line 70: | ||
| align=center | <math>\mathcal{W}</math> || align=right | [0,1] || Bounds of measurement function | | align=center | <math>\mathcal{W}</math> || align=right | [0,1] || Bounds of measurement function | ||
|- | |- | ||
| align=center | <math> | | align=center | <math>M_1, M_2</math> || align=right | 0.2 || Maximum measurement time | ||
|} | |} | ||
| Line 76: | Line 78: | ||
<gallery caption="Reference solution plots" widths="500px" heights="300px" perrow="1"> | <gallery caption="Reference solution plots" widths="500px" heights="300px" perrow="1"> | ||
Image: | Image:Jackson_OED.png| States, control, and sampling functions for a local optimum. Both measurement functions overlap. | ||
</gallery> | </gallery> | ||
Latest revision as of 10:17, 26 March 2026
| Jackson OED | |
|---|---|
| State dimension: | 1 |
| Differential states: | 13 |
| Discrete control functions: | 3 |
The Jackson OED problem is a variation of the Jackson problem. It looks for optimal time intervals to measure the three states in order to minimize the uncertainty of a follow-up parameter estimation problem for the two unknown parameters.
The mathematical equations form a small-scale ODE model. It also includes state sensitivities, the Fisher information matrix entries and integrated sampling states.
Mathematical formulation
We are interested in estimating the parameters and of the initial value problem
The initial values and are fixed. We are interested in how to choose the control and when to measure, with an upper bound on the measuring time. We can measure the states and directly, and . We use two different sampling functions, and in the same experimental setting. This can be seen either as a two-dimensional measurement function , or as a special case of a multiple experiment, in which , and are identical.
Now we formulate the OED problem with :
The evolution of the symmetric matrix is given by the weighted sum of observability Gramians for each observed function of states.
Parameters
These fixed values are used within the model:
| Symbol | Value | Description |
|---|---|---|
| 1 | Interaction between and | |
| 10 | Interaction between and | |
| 1 | Growth of under complementary control | |
| 1 | Horizon of the control problem | |
| 0.01 | Regularization of Fisher matrix | |
| [0,1] | Bounds of control function | |
| [0,1] | Bounds of measurement function | |
| 0.2 | Maximum measurement time |
Reference Solutions
Here is one local solution to the above control problem.
- Reference solution plots
-
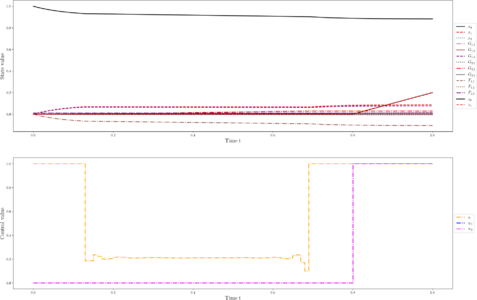 States, control, and sampling functions for a local optimum. Both measurement functions overlap.
States, control, and sampling functions for a local optimum. Both measurement functions overlap.

References
There were no citations found in the article.