Linear Quadratic Regulator: Difference between revisions
RobertLampel (talk | contribs) Created page with "{{Dimensions |nd = 1 |nx = 1 |nw = 1 }} The '''Linear Quadratic Regulator problem''' is a one-dimensional toy ODE model which is especially suited for multiple shooting solvers. It aims to minimize a quadratic Lagrange term. The optimal integer control functions exhibits a singular arc. == Mathematical formulation == <p> <math> \begin{array}{lll} \displaystyle \min_{x,w} && \int_0^{1..." |
RobertLampel (talk | contribs) |
||
| (3 intermediate revisions by the same user not shown) | |||
| Line 5: | Line 5: | ||
}} | }} | ||
The '''Linear Quadratic Regulator problem''' is a one-dimensional toy [[:Category:ODE model|ODE model]] which is especially suited for multiple shooting solvers. It aims to minimize a quadratic Lagrange term. | The '''Linear Quadratic Regulator problem''' is a popular one-dimensional toy [[:Category:ODE model|ODE model]] which is especially suited for multiple shooting solvers. It aims to minimize a quadratic Lagrange term. | ||
The optimal | The optimal control function exhibits a [[:Category:Sensitivity-seeking arcs|singular arc]]. | ||
== Mathematical formulation == | == Mathematical formulation == | ||
| Line 16: | Line 16: | ||
\text{subject to} \\ | \text{subject to} \\ | ||
\quad \dot{x}(t) & = & a \cdot x(t) + b \cdot u(t),\\ | \quad \dot{x}(t) & = & a \cdot x(t) + b \cdot u(t),\\ | ||
\quad x(0) &=& 1 | \quad x(0) &=& 1 | ||
\end{array} | \end{array} | ||
</math> | </math> | ||
</p> | </p> | ||
== Parameters == | == Parameters == | ||
| Line 29: | Line 28: | ||
Here is one local solution to the above control problem. | Here is one local solution to the above control problem. | ||
<gallery caption="Reference solution plots" widths=" | <gallery caption="Reference solution plots" widths="500px" heights="300px" perrow="1"> | ||
Image:LQR.png| States and discretized control for a local optimum. | Image:LQR.png| States and discretized control for a local optimum. | ||
</gallery> | </gallery> | ||
== Miscellaneous and Further Reading == | == Miscellaneous and Further Reading == | ||
The problem description and further references can be found | The problem description and further references can be found on Wikipedia [[#Wikipedia|[1]]]. | ||
== References == | == References == | ||
<span id=" | <span id="Wikipedia">[1]</span> https://en.wikipedia.org/wiki/Linear%E2%80%93quadratic_regulator <br> | ||
[[Category:MIOCP]] | [[Category:MIOCP]] | ||
[[Category:Sensitivity-seeking arcs]] | [[Category:Sensitivity-seeking arcs]] | ||
Latest revision as of 13:46, 28 November 2025
| Linear Quadratic Regulator | |
|---|---|
| State dimension: | 1 |
| Differential states: | 1 |
| Discrete control functions: | 1 |
The Linear Quadratic Regulator problem is a popular one-dimensional toy ODE model which is especially suited for multiple shooting solvers. It aims to minimize a quadratic Lagrange term.
The optimal control function exhibits a singular arc.
Mathematical formulation
Parameters
We choose and .
Reference Solutions
Here is one local solution to the above control problem.
- Reference solution plots
-
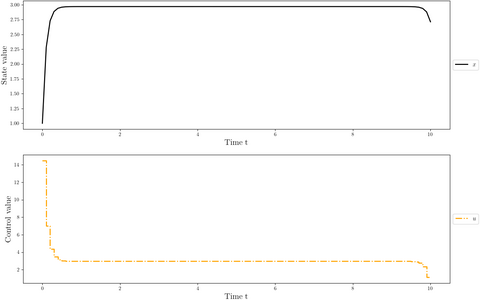 States and discretized control for a local optimum.
States and discretized control for a local optimum.

Miscellaneous and Further Reading
The problem description and further references can be found on Wikipedia [1].
References
[1] https://en.wikipedia.org/wiki/Linear%E2%80%93quadratic_regulator